rCore第八章
用户线程
数据结构
use std::arch::asm;
const DEFAULT_STACK_SIZE: usize = 1024 * 1024 * 2;
const MAX_THREADS: usize = 4;
static mut RUNTIME: usize = 0;
声明一些全局变量。
pub struct Runtime {
threads: Vec<Thread>,
current: usize,
}
#[derive(PartialEq, Eq, Debug)]
enum State {
Available,
Running,
Ready,
}
struct Thread {
id: usize,
stack: Vec<u8>,
ctx: ThreadContext,
state: State,
}
#[derive(Debug, Default)]
#[repr(C)]
struct ThreadContext {
rsp: u64,
r15: u64,
r14: u64,
r13: u64,
r12: u64,
rbx: u64,
rbp: u64,
}
声明用户态线程所需要的数据结构,由于用户态线程对于内核是不可知的,我们需要一个Runtime进行调度,这里Runtime中维护了一个Thread队列。由于用户态线程除了单独的栈,调用和普通函数一样,我们在保存寄存器状态时,只需要保存callee保存寄存器。
Runtime
在运行用户态线程之前,我们需要对运行时进行初始化。
impl Thread {
fn new(id: usize) -> Self {
Thread {
id,
stack: vec![0_u8; DEFAULT_STACK_SIZE],
ctx: ThreadContext::default(),
state: State:;Available,
}
}
}
impl Runtime {
pub fn new() -> Self {
let base_therad = Thread {
id: 0,
stack: vec![0_u8; DEFAULT_STACK_SIZE],
ctx: ThreadContext::default(),
state: State::Running,
}
let mut threads = vec![base_thread];
let mut available_threads: Vec<Thread> = (1..MAX_THREADS)
.map(|i| Thread::new(i))
.collect();
threads.append(&mut available_threads);
Runtime {
threads,
current: 0,
}
}
pub fn init(&self) {
unsafe {
let r_ptr: *const Runtime = self;
RUNTIME = r_ptr as usize;
}
}
}
这里初始化了主线程,这个线程用于调度其他的线程,是一开始默认调度的线程。同时将所有线程模板加入到队列中。运行时就是这个队列和当前线程号组成的。
impl Runtime {
#[inline(never)]
fn t_yield(&mut self) -> bool {
let mut pos = self.current;
while self.threads[pos].state != State::Ready {
pos += 1;
if pos == self.threads.len() {
pos = 0;
}
if pos == self.current {
return false;
}
}
if self.threads[self.current].state != State::Available {
self.threads[self.current].state = State::Ready;
}
self.threads[pos].state = State::Running;
let old_pos = self.current;
self.current = pos;
unsafe {
let old: *mut ThreadContext = &mut self.threads[old_pos].ctx;
let new: *const ThreadContext = &self.threads[pos].ctx;
asm!("call switch", in("rdi") old, in("rsi") new, clobber_abi("C"));
}
self.threads.len() > 0
}
}
首先介绍t_yield,这个方法会遍历thread队列,找到一个状态是Ready的线程,我们会将自己的current的状态设置为Ready。同时将我们选择的线程状态设置为running, 之后交换新旧线程的上下文。
pub fn spawn(&mut self, f: fn()) {
let available = self
.threads
.iter_mut()
.find(|t| t.state == State:;Available)
.expect("no available thread.")
let size = available.stack.len();
unsafe {
let s_ptr = available.stack.as_mut_ptr().offset(size as isize);
let s_ptr = (s_ptr as usize as !15) as *mut u8;
std::ptr::write(s_ptr.offset(-16) as *mut u64, guard as u64);
std::ptr::write(s_ptr.offset(-24) as *mut u64, skip as u64);
std::ptr::write(s_ptr.offset(-32) as *mut u64, f as u64);
available.ctx.rsp = s_ptr.offset(-32) as u64;
}
available.state = State::Ready;
}
#[naked]
unsafe extern "C" fn skip() {
asm!("ret", options(noreturn))
}
fn guard() {
unsafe {
let rt_ptr = RUNTIME as *mut Runtime;
(*rt_ptr).t_return();
};
}
这里spawn会遍历队列,找到一个没有被占位的Thread结构体,往线程对应的栈中压入f、skip、guard函数,之后将上下文中的sp指针指向f的位置,那么这个Thread就被创建完成加入到了队列中。
当所有的线程创建完毕时,在主线程中会调用run方法,
impl runtime {
pub fn run(&mut self) -> ! {
while self.t_yield() {}
std::process::exit(0);
}
fn t_return(&mut self) {
if self.current != 0 {
self.threads[self.current].state = State::Available;
self.t_yield();
}
}
}
run中将会不断地调用我们如下分析过的t_yield方法。
#[naked]
#[no_mangle]
unsafe extern "C" fn switch() {
asm!(
"mov [rdi + 0x00], rsp",
"mov [rdi + 0x08], r15",
"mov [rdi + 0x10], r14",
"mov [rdi + 0x18], r13",
"mov [rdi + 0x20], r12",
"mov [rdi + 0x28], rbx",
"mov [rdi + 0x30], rbp",
"mov rsp, [rsi + 0x00]",
"mov r15, [rsi + 0x08]",
"mov r14, [rsi + 0x10]",
"mov r13, [rsi + 0x18]",
"mov r12, [rsi + 0x20]",
"mov rbx, [rsi + 0x28]",
"mov rbp, [rsi + 0x30]",
"ret", options(noreturn)
);
}
如上是switch函数,我们需要交换所有的线程中的callee保存寄存器。
内核线程
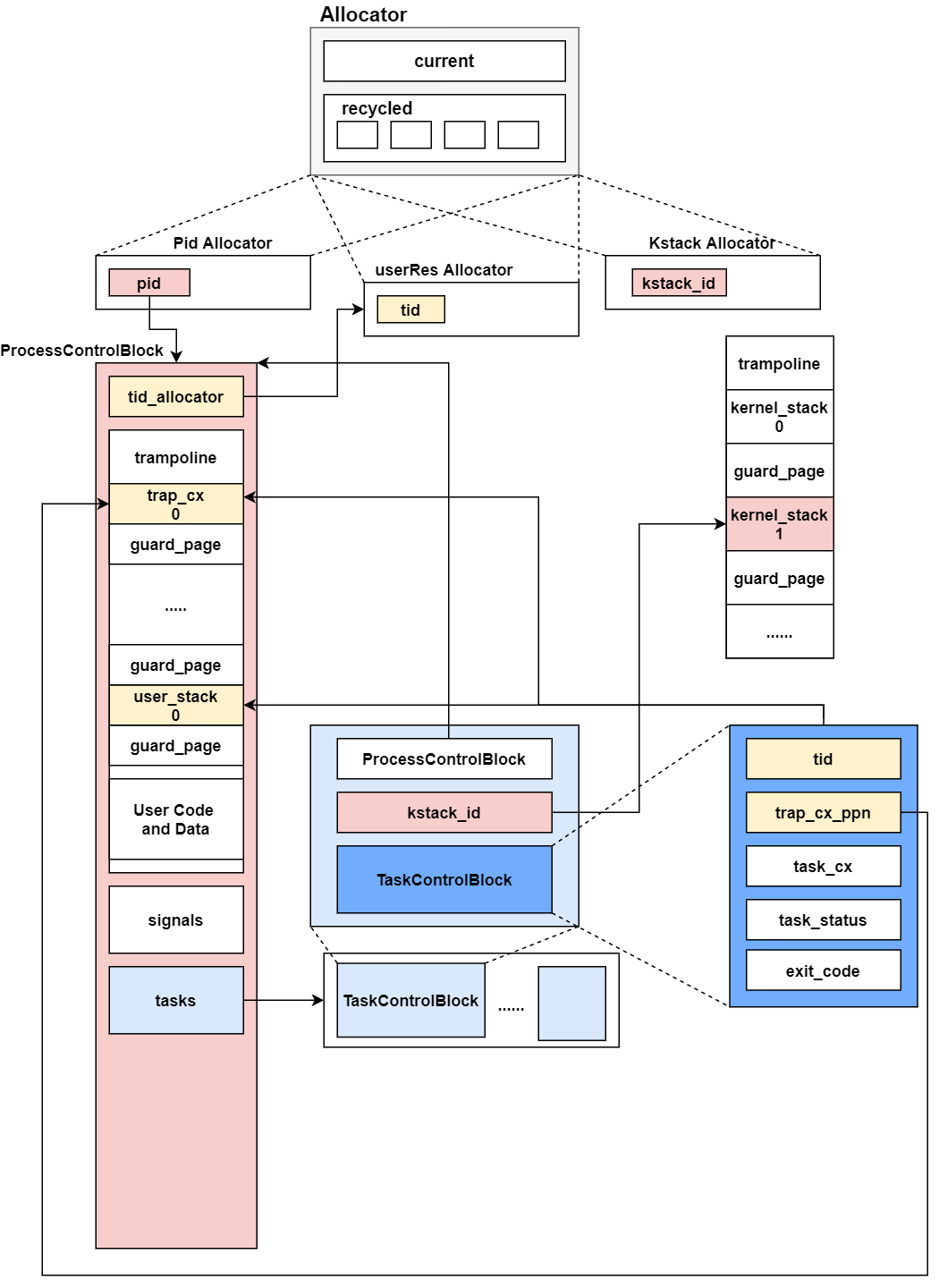
这里存在三种资源分配器,一个是pid,kstack_id和userRes_id, 由于userRes在每个pid分配的资源中进行再分配,所以userRes从0号开始分配。同时kstack_id则是所有进程的线程是同等,需要一个跨越不同进程的分配器,让不同的进程中线程分配的内核栈空间不重合。
对于一个ProcessControlBlock 其中根据上面的描述,它有一个独立的tid_allocator来管理线程号,还有一个地址空间映射,进程中的所有的线程共享这个地址空间。同时tasks队列中有一些线程控制块TaskControlBlock, 线程控制块中保存了一些线程独有的信息,如tid, task_cx, trap_cx_ppn。
当我们创建一个进程时,代码如下:
pub fn new(elf_data: &[u8]) -> Arc<Self> {
let (memory_set, ustack_base, entry_point) = MemorySet::from_elf(elf_data);
let pid_handle = pid_alloc();
let process = Arc::new(Self {
pid: pid_handle,
inner: unsafe {
UPSafeCell::new(ProcessControlBlockInner {
is_zombie: false,
memory_set: None,
parent: None,
children: Vec::new(),
exit_code: 0,
fd_table: vec![
Some(Arc::new(Stdin)),
Some(Arc::new(Stdout)),
Some(Arc::new(Stdout)),
],
signals: SignalFlags::empty(),
tasks: Vec::new(),
task_res_allocator: RecycleAllocator::new(),
mutex_list: Vec::new(),
semaphore_list: Vec::new(),
condvar_list: Vec::new(),
})
},
});
let task = Arc::new(TaskControlBlock::new(
Arc::clone(&process),
ustack_base,
true,
));
let task_inner = task.inner_exclusive_access();
let trap_cx = task_inner.get_trap_cx();
let ustack_top = task_inner.res.as_ref().unwrap().ustack_top();
let kstack_top = task.kstack.get_top();
drop(task_inner);
*trap_cx = TrapContext::app_init_context(
entry_point,
ustack_top,
KERNEL_SPACE.exclusive_access().token(),
kstack_top,
trap_handler as usize,
);
let mut process_inner = process.inner_exclusive_access();
process_inner.tasks.push(Some(Arc::clone(&task)));
drop(process_inner);
insert_into_pid2process(process.getpid(), Arc::clone(&process));
add_task(task);
process
}
根据ELF文件的内容获取到地址空间memory_set, 接着申请一个pid,根据这些结构申请一个process control Block结构,这个结构中有memory_set, 父子关系,exit_code, 文件描述符表,信号队列,线程队列,线程号分配器,互斥锁,信号量,条件变量。
其中部分资源需要进行初始化,比如线程队列,我们需要压入一个主线程,它的线程号为0,我们需要设置线程的入口地址,栈空间,satp, 陷入处理函数。最后将这个线程压入队列,同时将这个线程加入整个调度队列中,最后返回这个process
pub fn exec(self: &Arc<Self>, elf_data: &[u8], args: Vec<String>) {
assert_eq!(self.inner_exclusive_access().thread_count(), 1);
let (memory_set, ustack_base, entry_point) = MemorySet::from_elf(elf_data);
let new_token = memory_set.token();
self.inner_exclusive_access().memory_set = memory_set;
let task = self.inner_exclusive_access().get_task(0);
let mut task_inner = task.inner_exclusive_access();
task_inner.res.as_mut().unwrap().ustack_base = ustack_base;
task_inner.res.as_mut().unwrap().alloc_user_res();
task_inner.trap_cx_ppn = task_inner.res.as_mut().unwrap().trap_cx_ppn();
let mut user_sp = task_inner.res.as_mut().unwrap().ustack_top();
user_sp -= (arg.len() + 1) * core::mem::size_of::<usize>();
let mut argv: Vec<_> = (0..=args.len())
.map(|arg| {
translated_refmut(
new_token,
(argv_base + arg * core::mem::size_of::<usize>()) as *mut usize,
)
})
.collect();
*argv[args.len()] = 0;
for i in 0..args.len() {
user_sp -= args[i].len() + 1;
*argv[i] = user_sp;
let mut p = user_sp;
for c in args[i].as_bytes() {
*translated_refmut(new_token, p as *mut u8) = *c;
p += 1;
}
*translated_refmut(new_token, p as *mut u8) = 0;
}
user_sp -= user_sp % core::mem::size_of::<usize>();
let mut trap_cx = TrapContext::app_init_context(
entry_point,
user_sp,
KERNEL_SPACE.exclusive_access().token(),
task.kstack.get_top(),
trap_handler as usize,
);
trap_cx.x[10] = args.len();
trap_cx.x[11] = argv_base;
*task_inner.get_trap_cx() = trap_cx;
}
对于执行一个ELF文件,我们通过要解析ELF文件后获取memory_set, 替换原来的memory_set, 之后替换原来主线程的用户栈(栈底的位置),分配tid号同时分配对应的资源,设置新的trap_cx_ppn。压入exec的传给用户进程的参数。最后我们要对刚才的trap_cx_ppn处的内容进行初始化,设置完返回值后,返回。
//对于fork我们只支持只有一个线程的进程
pub fn fork(self: &Arc<Self>) -> Arc<Self> {
let mut parent = self.inner_exclusive_access();
assert_eq!(parent.thread_count(), 1);
let memory_set = MemorySet::from_existed_user(&parent.memory_set);
let pid = pid_alloc();
let mut new_fd_table: Vec<Option<Arc<dyn File + Send + Sync>>> = Vec::new();
for fd in parent.fd_table.iter() {
if let Some(file) = fd {
new_fd_table.push(Some(file.clone()));
} else {
new_fd_table.push(None);
}
}
let child = Arc::new(Self {
pid,
inner: unsafe {
UPSafeCell::new(ProcessControlBlockInner{
is_zombie: false,
memory_set,
parent: Some(Arc::downgrade(self)),
children: Vec::new(),
exit_code: 0,
fd_table: new_fd_table,
signals: SignalFlags::empty(),
tasks: Vec::new(),
tasks_res_allocator: RecycleAllocator::new(),
mutex_list: Vec::new(),
semaphore_list: Vec::new(),
condvar_list: Vec::new(),
})
},
});
parent.children.push(Arc::clone(&child));
let task = Arc::new(TaskControlBlock::new(
Arc::clone(&child),
parent
.get_task(0)
.inner_exclusvie_access()
.res
.as_ref()
.unwrap()
.ustack_base(),
false,
));
let mut child_inner = child.inner_exclusive_access();
child_inner.tasks.push(Some(Arc::clone(&task)));
drop(child_inner);
let task_inner = task.inner_exclusive_access();
let trap_cx = task_inner.get_trap_cx();
trap_cx.kernel_sp = task.kstack.get_top();
drop(task_inner);
insert_into_pid2process(child.getpid(), Arc::clone(&child));
add_task(task);
child
}
首先复制父进程的地址空间,申请一个pid, 之后复制父进程的文件描述符表。接着我们需要压入子进程。和上面的函数类似,我们需要为我们的进程创建主线程,将这个线程压入process control block的线程队列中。最后将这个进程的主线程压入到调度队列中。
但是在加入多线程后更加复杂的是退出的功能,我们要对退出的是主线程的情况进行区分。
pub fn exit_current_and_run_next(exit_code: i32) {
let task = take_current_task().unwrap();
let mut task_inner = task.inner_exclusive_access();
let process = task.process.upgrade().unwrap();
let tid = task_inner.res.as_ref().unwrap().tid;
task_inner.exit_code = Some(exit_code);
task_inner.res = None;
drop(task_inner);
drop(task);
if tid == 0 {
let pid = process.getpid();
if pid == IDLE_PID {
println!(
"[kernel] Idle process exit with exit_code {} ...",
exit_code
);
if exit_code != 0 {
crate::board::QEMU_EXIT_HANDLE.exit_failure();
} else {
crate::board::QEMU_EXIT_HANDLE.exit_success();
}
}
remove_from_pid2process(pid);
let mut process_inner = process.inner_exclusive_access();
process_inner.is_zombie = true;
process_inner.exit_code = exit_code;
{
let mut initproc_inner = INITPROC.inner_exclusive_access();
for child in process_inner.children.iter() {
child.inner_exclusive_access().parent = Some(Arc::downgrade(&INITPROC));
initproc_inner.children.push(child.clone());
}
}
let mut recycle_res = Vec::<TaskUserRes>>::new();
for task in process_inner.tasks.iter().filter(|t| t.is_some()) {
let task = task.as_ref().unwrap();
remove_inactive_task(Arc::clone(&task));
if let Some(res) = task_inner.res.take() {
recycle_res.push(res);
}
}
drop(process_inner);
recycle_res.clear();
let mut process_inner = process.inner_exclusive_access();
process_inner.children.clear();
process_inner.memory_set.recycle_data_pages();
process_inner.fd_table.clear();
process_inner.tasks.clear();
}
drop(process);
let mut _unused = TaskContext::zero_init();
schedule(&mut _unused as *mut _);
}
首先获取当前线程的tid, 设置线程的exit_code, 之后如果tid为0,我们需要设置进程的exit_code, 之后将子进程都转移到init进程下。接下来我们需要回收线程的资源。我们生成一个TaskUserRes, 接着遍历进程的task队列,将这些线程移除队列,并回收对应的线程号。
最后将文件描述表,子进程表,页资源回收。调度下一个线程。
接下来是系统调用是如何实现的代码:
pub fn sys_thread_create(entry: usize, arg: usize) -> isize {
let task = current_task().unwrap();
let process = task.process.upgrade().unwrap();
let new_task = Arc::new(TaskControlBlock::new(
task.inner_exclusive_access()
.res
.as_ref()
.unwrap()
.ustack_base,
true,
));
add_task(Arc::clone(&new_task));
let new_task_inner = new_task.inner_exclusive_access();
let new_task_res = new_task_inner.res.as_ref().unwrap();
let new_task_tid = new_task_res.tid;
let mut process_inner = process.inner_exclusive_access();
let tasks = &mut process_inner.tasks;
while tasks.len() < new_task_tid + 1 {
tasks.push(None)
}
tasks[new_task_tid] = Some(Arc::clone(&new_task));
let new_task_trap_cx = new_task_inner.get_trap_cx();
*new_task_trap_cx = TrapContetx::app_init_context(
entry,
new_task_res.ustack_top(),
kernel_token(),
new_task.kstack.get_top(),
trap_handler as usize,
)
(*new_task_trap_cx.x[10]) = arg;
new_task_tid as usize
}
线程的创建我们需要获取现在的父进程,之后创建一个空的线程结构,分配一个tid,将这个线程加入进程的队列中,接下来将这个线程的trap上下文设置好就可以返回。
pub fn sys_waittid(tid: usize) -> i32 {
let tasks = current_task().unwrap();
let process = tasks.process.upgrade().unwrap();
let task_inner = task.inner_exclusive_access();
let mut process_inner = processor.inner_exclusive_access();
if task_inner.res.as_ref().unwrap().tid == tid {
return -1;
}
let mut exit_code: Option<i32> = None;
let waited_task = processor_inner.tasks[tid].as_ref();
if let Some(waited_task) = waited_task {
if let Some(waited_exit_code) = waited_task.inner_exclusive_access().exit_code {
exit_code = Some(waited_exit_code);
}
} else {
// waited thread does not exist
return -1;
}
if let Some(exit_code) = exit_code {
// dealloc the exited thread
process_inner.tasks[tid] = None;
exit_code
} else {
// waited thread has not exited
-2
}
}
获取进程控制块后,会检查子进程中的exit_code,进行返回。
同步互斥
这里互斥锁的实现是一个自旋锁或者阻塞锁:
pub struct MutexSpin {
locked: UPSafeCell<bool>,
}
impl MutexSpin {
pub fn new() -> Self {
Self {
locked unsafe { UPSafeCell}
}
}
}
impl Mutex for MutexSpin {
fn lock(&self) {
loop {
let mut locked = self.locked.exclusive_access();
if *locked {
drop(locked);
suspend_current_and_run_next();
continue;
} else {
*locked = true;
return ;
}
}
}
fn unlock(&self) {
let mut locked = self.locked.exclusive_access();
*locked = false;
}
}
对于spin形式的锁,会直接判断这个锁是否已经获取,如果已经被其他的线程获取了,那么就调度其他线程进行执行。而MutexBlocking内部维护了一个队列:
pub struct MutexBlocking {
inner: UPSafeCell<MutexBlockingInner>,
}
pub struct MutexBlockingIner {
locked: bool,
wait_queue: VecDeque<Arc<TaskControlBlock>>,
}
impl MutexBlocking {
pub fn new() -> Self {
Self {
inner: unsafe {
UPSafeCell::new(MutexBlockingInner{
locked: false,
wait_queue: VecDeque::new(),
})
},
}
}
}
impl Mutex for MutexBlocking {
fn lock(&self) {
let mut mutex_inner = self.inner.exclusive_access();
if mutex_inner.locked {
mutex_inner.wait_queue.push(current_task().unwrap());
drop(mutex_inner);
block_current_and_run_next();
} else {
mutex_inner.locked = true;
}
}
fn unlock(&self) {
let mut mutex_inner = self.inner.exclusive_access();
assert!(mutex_inner.locked);
if let Some(waking_task) = mutex_inner.wait_queue.pop_front() {
wakeup_task(waking_task);
} else {
mutex_inner.locked = false;
}
}
}
这里可以发现调用的是block_current_and_run_next, 所说这个线程将被拿出调度队列,于是内核调度时就不会考虑这个线程。而对锁解锁时,就可以拿出一个wait_queue中的阻塞线程加入到调度队列中。
下面是信号量的实现,也十分类似:
pub struct Semaphore {
pub inner: UPSafeCell<Semaphore>,
}
pub struct SemaphoreInner {
pub count: isize,
pub wait_queue: VecDeque<Arc<TaskControlBlock>>,
}
impl Semaphore {
pub fn new(res_count: usize) -> Self {
Self {
inner: unsafe {
UPSafeCell:new(SemaphoreInner {
count: res_count as isize,
wait_queue: VecDeque::new(),
})
},
}
}
pub fn up(&self) {
let mut inner = self.inner.exclusive_access();
inner.count += 1;
if inner.count <= 0 {
if let Some(task) = inner.wait_queue.pop_front() {
wakeup_task(task);
}
}
}
pub fn down(&self) {
let mut inner = self.inner.exclusive_access();
inner.count -= 1;
if inner.count < 0 {
inner.wait_queue.push_back(current_task().unwrap());
drop(inner);
block_current_and_run_next();
}
}
}
同样我们维护了一个队列,相当于对于mutexBlock进行了扩展, 只要信号量小于0,就要压入队列中。
下面是条件变量:
pub struct Condvar {
pub inner: UPSafeCell<CondvarInner>,
}
pub struct CondvarInner {
pub wait_queue: VecDeque<Arc<TaskControlBlock>>,
}
impl Condvar {
pub fn new() -> Self {
inner: unsafe {
UPSafeCell::new(CondvarInner {
wait_queue: VecDeque::new(),
})
},
}
pub fn signal(&self) {
let mut inner = self.inner.exclusive_access();
if let Some(task) = inner.wait_queue.pop_front() {
wakeup_task(task);
}
}
pub fn wait(&self, mutex: Arc<dyn Mutex>) {
mutex.unlock();
let mut inner = self.inner.exclusive_access();
inner.wait_queue.push_back(current_task().unwrap());
drop(inner);
block_current_and_run_next();
mutex.lock();
}
}
这里采用比较常用的方式,使用mutex和阻塞实现条件变量。
pub fn sys_mutex_create(blocking: bool) -> isize {
let process = current_process();
let mutex: Option<Arc<dyn Mutex>> = if !blocking {
Some(Arc::new(MutexSpin::new()))
} else {
Some(Arc::new(MutexBlocking::new()))
};
let mut process_inner = process.inner_exclusive_access();
if let Some(id) = process_inner
.mutex_list
.iter()
.enumerate()
.find(|(_, item)| item.is_none())
.map(|(id, _)| id)
{
process_inner.mutex_list[id] = mutex;
id as isize
} else {
process_inner.mutex_list.push(mutex);
process_inner.mutex_list.len() as isize - 1
}
}
这里将mutex设置为一个Spin或者Block的锁,之后遍历process中的mutex队列,将这个申请的mutex放入队列中。最后会返回锁的ID。
pub fn sys_mutex_lock(mutex_id: usize) -> isize {
let process = current_process();
let process_inner = process.inner_exclusive_access();
let mutex = Arc::clone(process_inner.mutex_list[mutex_id].as_ref().unwrap());
drop(process_inner);
drop(process);
mutex.lock();
0
}
这里会对应的锁进行锁住,在锁被占用的情况,如果是spin的锁将直接调度下一个进程,如果是block锁,会将对应的线程加入到锁的阻塞队列中。
pub fn sys_mutex_unlock(mutex_id: usize) -> isize {
let process = current_process();
let process_inner = process.inner_exclusive_access();
let mutex = Arc::clone(process_inner.mutex_list[mutex_id].as_ref().unwrap());
drop(process_inner);
drop(process);
mutex.unlock();
}
对于信号量,我们需要up和down函数,来对统计量进行控制。
pub fn sys_semaphore_create(res_count: usize) -> isize {
let process = current_process();
let mut process_inner = process.inner_exclusive_access();
let id = if let Some(id) = process_inner
.semaphore_list
.iter()
.enumerate()
.find(|(_, item)| item.is_none())
.map(|(id, _)| id)
{
process_inner.semaphore_list[id] = Some(Arc::new(Semaphore::new(res_count)));
id
} else {
process_inner
.semaphore_list
.push(Some(Arc::new(Semaphore::new(res_count))));
process_inner.semaphore_list.len() - 1
};
id as isize
}
pub fn sys_semaphore_up(sem_id: usize) -> isize {
let process = current_process();
let process_inner = process.inner_exclusive_access();
let sem = Arc::clone(process_inner.semaphore_list[sem_id].as_ref().unwrap());
drop(process_inner);
sem.up();
0
}
pub fn sys_semaphore_down(sem_id: usize) -> isize {
let process = current_process();
let process_inner = process.inner_exclusive_access();
let sem = Arc::clone(process_inner.semaphore_list[sem_id].as_ref().unwrap());
drop(process_inner);
sem.down();
0
}
信号量的创建过程和mutex类似,但是这里需要up和down两个函数对于count进行维护,一旦up 表示一类资源进行了释放,可以从队列中取出一个阻塞的任务进行执行。
pub fn sys_condvar_create() -> isize {
let process = current_process();
let mut process_inner = process.inner_exclusive_access();
let id = if let Some(id) = process_inner
.condvar_list
.iter()
.enumerate()
.find(|(_, item)| item.is_none())
.map(|(id, _)| id)
{
process_inner.condvar_list[id] = Some(Arc::new(Condvar::new()));
id
} else {
process_inner
.condvar_list
.push(Some(Arc::new(Condvar::new())));
process_inner.condvar_list.len() - 1
};
id as isize
}
pub fn sys_condvar_signal(condvar_id: usize) -> isize {
let process = current_process();
let process_inner = process.inner_exclusive_access();
let condvar = Arc::clone(process_inner.condvar_list[condvar_id].as_ref().unwrap());
drop(process_inner);
condvar.signal();
0
}
pub fn sys_condvar_wait(condvar_id: usize, mutex_id: usize) -> isize {
let process = current_process();
let process_inner = process.inner_exclusive_access();
let condvar = Arc::clone(process_inner.condvar_list[condvar_id].as_ref().unwrap());
let mutex = Arc::clone(process_inner.mutex_list[mutex_id].as_ref().unwrap());
drop(process_inner);
condvar.wait(mutex);
0
}
对于条件变量,创建过程一样,需要在进程的条件变量队列中进行申请。这里分析signal和wait,可以发现这里不同的一点是wait需要传入一个mutex_id, 这里wait是会将这个锁打开,让后将线程控制块加入到队列中。一旦一个signal发生,会将一个线程控制块取出,之后线程控制块的代码从sys_condvar_wait代码中恢复,将锁再次锁住。
这样使用一个条件变量时,就必须先使用wait。等待一个事件进行signal。